Applied AI / Sensor fusion
BEV road corridor segmentation
A sensor-fusion baseline that converts Argoverse 2 camera, LiDAR, ego pose, calibration, and HD map data into BEV inputs for main road corridor segmentation.
Project notes
This page keeps the useful project details in one place: data preparation, target definition, baseline results, and limitations.
-
Predict the main road corridor in bird's-eye view.
The goal was a focused segmentation baseline using Argoverse 2 camera, LiDAR, ego pose, calibration, and HD map geometry.
-
A BEV data pipeline and segmentation baseline.
The pipeline aligns LiDAR and camera data into the ego frame, samples RGB from seven ring cameras, rasterizes map-derived corridor targets, trains PyTorch baselines, and writes figures for review.
-
Main corridor instead of all drivable area.
Early experiments with full drivable-area labels were too broad for the baseline. The final target uses ego-aligned lane boundary geometry to focus on the road corridor ahead.
-
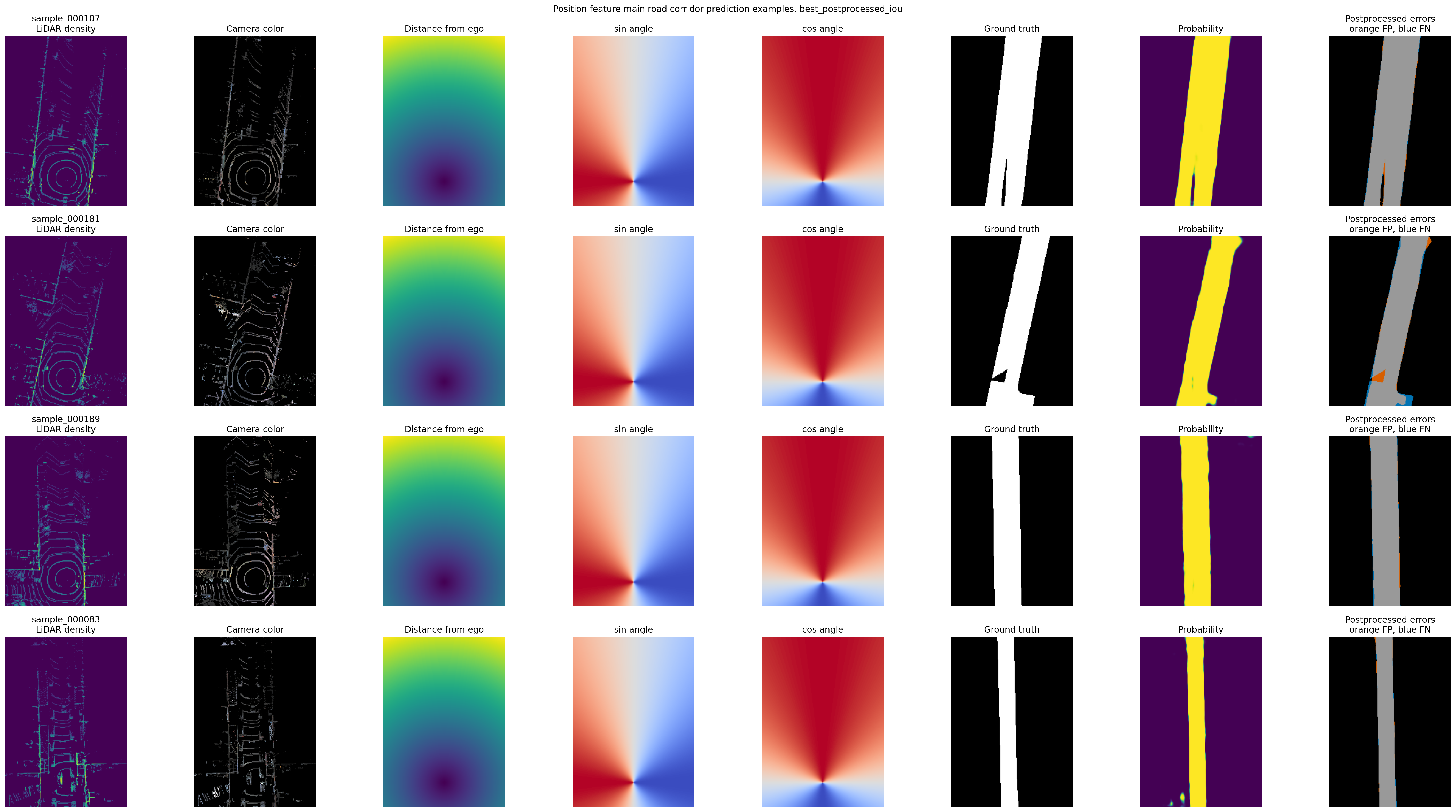
0.8637 raw IoU; 0.8649 postprocessed IoU.
The final baseline used 320 samples, an 80/20 train-validation split, and 11 BEV channels combining LiDAR, RGB, distance, angle, and ego-position features.
-
Harder on angled roads and farther-forward regions.
The report identifies where the baseline works well and where sparse observations or road geometry make the result less reliable.
-
The repo includes code, figures, training histories, and analysis notes.
Argoverse 2 dataset files are not included. Data and derived figures are subject to the Argoverse license terms.